服务邮箱:
info@hhmicro.cn
联系电话:
021-58380876
联系地址:
上海市浦东新区纳贤路60弄5号楼202C
服务邮箱:
info@hhmicro.cn
联系电话:
021-58380876
联系地址:
上海市浦东新区纳贤路60弄5号楼202C
摘要:
散斑直接飞行时间(Spot dToF)系统,区别于普通的Flash dToF系统,其投射出的激光,并非闪光灯式的均匀光,而是由多束不同出射角的激光束组成。激光束照射到物体上会形成规则的光斑阵列(Spot Array),部分返回并被接收端的单光子雪崩二极管(SPAD)阵列接收,通过记录光子往返的飞行时间,从而计算出每个Spot所在位置的深度。Spot dToF系统在信号质量、测距范围、点云密度、功耗和芯片电路设计之间,取得了最佳的平衡,将是AR/VR系统不可或缺的硬件支撑之一。
继苹果(Apple)公司的激光雷达扫描仪(LiDAR Scanner)技术之后,世瞳微近日发布了自研Spot dToF系统,为国内首发。该系统的单帧点云数量为576,SPAD阵列的像素分辨率为120 × 120,点云深度精度约3mm,在相同的激光功率下,其深度数据的SNR有10×以上的提升。
正文:
2020年3月,苹果公司发布了黑科技LiDAR Scanner,搭载在iPad Pro平板电脑上,来支撑其增强现实(AR)愿景以及改善相机拍照效果,一经发布,就成为了业界的标杆。LiDAR Scanner创造性地将Spot投射技术,与基于SPAD阵列的dToF技术相结合,破解了高分辨率SPAD阵列功耗的难题,同时能提供高精度、高空间分辨率、中远距离的稀疏点云,很好地满足了AR系统的需求。
据麦姆斯咨询报道,近日,上海世瞳微电子发布了其自研Spot dToF系统,代号为Polarstar,能够在空间中均匀地投射出576个光斑,并获取这些激光光斑在物体反射位置的深度信息,形成高质量的点云图。该Spot dToF系统模组实物如图1所示,主要由发射端(Tx)和接收端(Rx)构成,左侧方形部件为散斑投射器(Spot Projector),主要由4 × 16的点阵垂直腔面发射激光器(VCSEL)芯片、准直镜和3 × 3复制系数的光学衍射元件(DOE)组成,其投射的940nm激光光斑图案,如图2所示,为均匀排布的576个光斑,每相邻最近的3个Spot构成一个等边三角形。接收端Rx的SPAD传感器型号为HHC0101,这是世瞳微先前发布的一款120 × 120分辨率的自研SPAD阵列,光学靶面1/3英寸。详见:惚恍微SPAD HDR成像。
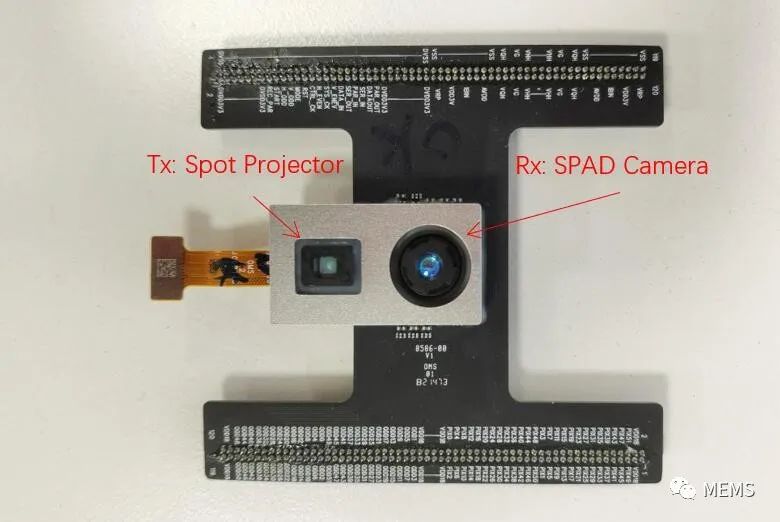
图1 世瞳微Polarstar Spot dToF模组实物照片
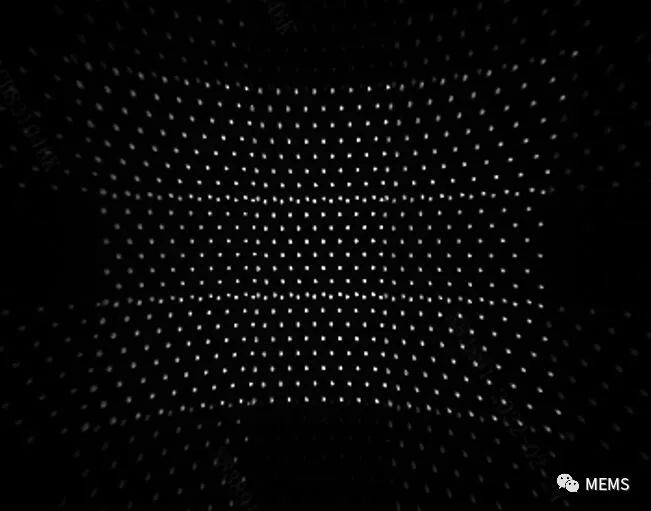
图2 由红外相机拍摄,Spot Projector投射出的激光光斑,共576 spots
为了评价HHC0101的基础3D成像效果,接收端Rx搭配常规的Flash均匀激光光源,对玩具小车进行了成像,并用点云图进行展示,如图3所示。在深度伪彩色的标记下,可以清楚的看到小车各个部件的深度信息,其中车厢平面的点云精度约为3mm(统计STD值),点云分辨率为120 × 120。
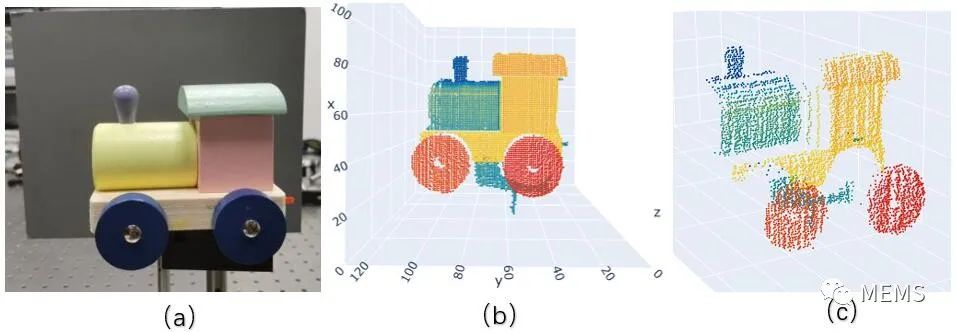
图3 拍摄场景,以及搭配普通的Flash激光照明的120 × 120分辨率点云图。a) 被拍摄物体照片。b) 搭配常规Flash均匀激光投射器拍摄的3D点云图,分辨率为120 × 120,正面视角。c) 侧面视角,清晰的看到小车各个部件在Z轴(深度)方向上的分布
在单个Spot覆盖了多个SPAD像素的情况下,如何准确找到Spot的中心位置?世瞳微开发了Spot寻址算法,利用了dToF直方图所包含的强度信息,能够准确定位Spot中心对应的像素。
对比Spot中心像素与搭配常规Flash激光工作像素的原始直方图,发现在激光功率大致相同的情况下,Spot中心像素的直方图峰值是Flash模式下的10倍以上,这得益于Spot模式下,激光能量得到了聚焦。因此,Spot dToF在激光功率受限的情况下,可获得高信噪比的点云,达到5m的测距范围,并且抗阳光干扰能力出色。
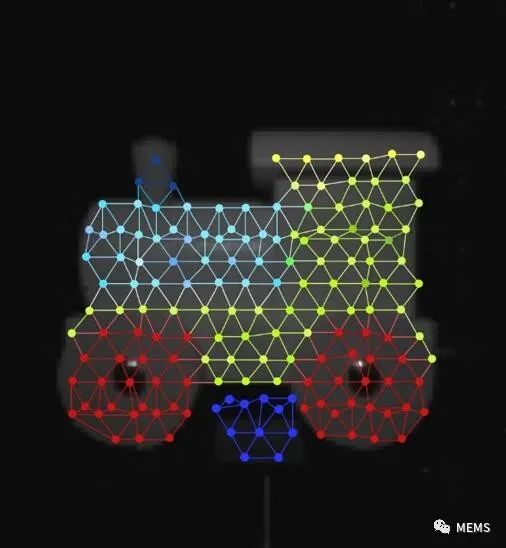
图4 Polarstar模组拍摄的点云图,与场景灰度图进行了融合和简单网格划分,并用伪彩色标记Z轴深度
总结
Spot dToF系统由于激光光斑能量集中,具有信噪比高、测距远、抗阳光干扰等优势。其稀疏的高质量点云,可以为AR设备的环境感测系统提供可靠的“锚点”,对即时定位与地图构建(SLAM)、Mesh等基础功能模块有着重要作用。通过AR设备的移动扫描,配合摄像头以及惯性测量单元(IMU)传感器,以及多传感器融合算法,稀疏的点云将变得足够的稠密。
Spot dToF系统同样可用于车载激光雷达,尤其适合中、近距离的补盲雷达。在机器人领域,Spot dToF系统可靠的点云锚点,能够大幅度改善定位、导航系统的鲁棒性。
Spot dToF系统对SPAD阵列的要求大大提高了,要求Sensor必须变得非常智能,比如,能够实时追踪Spot在SPAD面阵上的移动,开启Spot覆盖的特定SPAD像素,并将附近的TDC电路配置给被点亮的像素群。因此芯片的架构需要大幅度的调整,存在巨大的创新空间。
据悉,世瞳微是国内为数不多有Spot dToF芯片研发能力的公司,Polarstar模组为国内首发。在研发过程中,积累了关于Spot dToF系统的宝贵Know-how,并计划在下一颗SPAD阵列芯片内合入优化设计,包括片上Spot寻址算法、TDC的动态分配、直方图压缩、动态打光控制等关键技术,追求更加智能和更低的功耗。
特别感谢
Polarstar模组中所用dToF专用Laser Driver,来自光梓科技,具有驱动功率高,脉冲窄等特点。Driver产生的脉冲可窄至数百ps,远优于常规Driver的1~2ns,对dToF系统的测距精度有明显提升。
光源部分,采用了纵慧的一款为Spot dToF系统设计的4 x 16点阵排布的VCSEL芯片,该芯片具备单点输出光功率高,能效比高的特点,很好地满足了系统的设计要求。
模组方案,由世瞳微与模组厂联合设计。